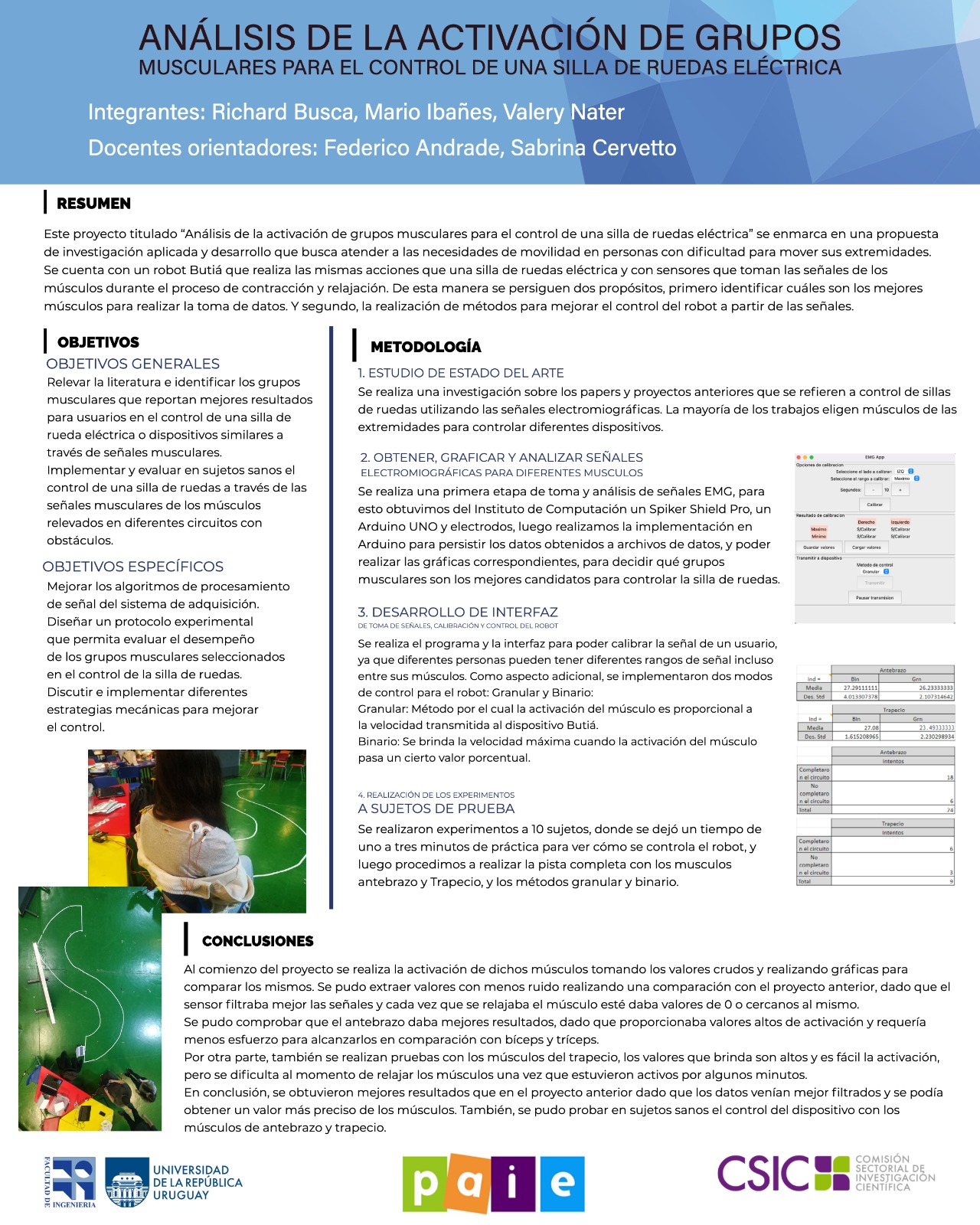
Este proyecto titulado “Análisis de la activación de grupos musculares para el control de una silla de ruedas eléctrica” se enmarca en una propuesta de investigación aplicada y desarrollo que busca atender a las necesidades de movilidad en personas con dificultad para mover sus extremidades. Este proyecto se encuentra integrado por los investigadores responsables Federico Andrade y Sabrina Cervetto, y por los estudiantes Richard Busca, Mario Ibañez y Valery Nater. Se cuenta con un robot Butiá que realiza las mismas acciones que una silla de ruedas eléctrica y con sensores que toman las señales de los músculos durante el proceso de contracción y relajación. De esta manera se persiguen dos propósitos, primero identificar cuáles son los mejores músculos para realizar la toma de datos. Y segundo, la realización de métodos para mejorar el control del robot a partir de las señales. En la obtención de datos, los valores más claros fueron tomados de los músculos del antebrazo y trapecio. Por otra parte, se realizan dos pruebas para el control del robot, la primera es llamada granular y cada vez que el músculo se activa, la velocidad del robot va a depender del mismo. La segunda prueba llamada binaria, la velocidad siempre va a ser máxima cuando se activa el músculo. Los resultados son novedosos y muestran que el trapecio podría ser un músculo útil para el control de una silla de ruedas eléctrica, sin embargo se considera que requiere una etapa de entrenamiento superior en comparación con el antebrazo.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}